This class represents a transition kernel with a scaled covariance matrix on hybrid bounded/unbounded state spaces. More...
#include <TransformedScaledCovMatrixTKGroup.h>
Public Member Functions | |
| void | transformToGaussianSpace (const V &physicalPoint, V &transformedPoint) const |
Constructor/Destructor methods | |
| TransformedScaledCovMatrixTKGroup (const char *prefix, const BoxSubset< V, M > &boxSubset, const std::vector< double > &scales, const M &covMatrix) | |
| Default constructor. More... | |
| ~TransformedScaledCovMatrixTKGroup () | |
| Destructor. More... | |
Statistical/Mathematical methods | |
| bool | symmetric () const |
| Whether or not the matrix is symmetric. Always 'false'. More... | |
| const InvLogitGaussianVectorRV < V, M > & | rv (unsigned int stageId) const |
| InvLogitGaussian increment property to construct a transition kernel. More... | |
| const InvLogitGaussianVectorRV < V, M > & | rv (const std::vector< unsigned int > &stageIds) |
| InvLogitGaussian increment property to construct a transition kernel. More... | |
| void | updateLawCovMatrix (const M &covMatrix) |
| Scales the covariance matrix of the underlying Gaussian distribution. More... | |
Misc methods | |
| bool | setPreComputingPosition (const V &position, unsigned int stageId) |
Sets the pre-computing positions m_preComputingPositions[stageId] with a new vector of size position. More... | |
| void | clearPreComputingPositions () |
Clears the pre-computing positions m_preComputingPositions[stageId]. More... | |
I/O methods | |
| void | print (std::ostream &os) const |
| TODO: Prints the transition kernel. More... | |
 Public Member Functions inherited from QUESO::BaseTKGroup< V, M > Public Member Functions inherited from QUESO::BaseTKGroup< V, M > | |
| BaseTKGroup () | |
| Default constructor. More... | |
| BaseTKGroup (const char *prefix, const VectorSpace< V, M > &vectorSpace, const std::vector< double > &scales) | |
| Constructor. More... | |
| virtual | ~BaseTKGroup () |
| Destructor. More... | |
| const BaseEnvironment & | env () const |
| QUESO's environment. More... | |
| const V & | preComputingPosition (unsigned int stageId) const |
| Pre-computing position; access to protected attribute *m_preComputingPositions[stageId]. More... | |
Private Member Functions | |
| void | setRVsWithZeroMean () |
| Sets the mean of the underlying Gaussian RVs to zero. More... | |
Private Attributes | |
| const BoxSubset< V, M > & | m_boxSubset |
| M | m_originalCovMatrix |
Additional Inherited Members | |
| Protected Attributes inherited from QUESO::BaseTKGroup< V, M > | |
| const EmptyEnvironment * | m_emptyEnv |
| const BaseEnvironment & | m_env |
| std::string | m_prefix |
| const VectorSpace< V, M > * | m_vectorSpace |
| std::vector< double > | m_scales |
| std::vector< const V * > | m_preComputingPositions |
| std::vector< BaseVectorRV< V, M > * > | m_rvs |
Detailed Description
template<class V = GslVector, class M = GslMatrix>
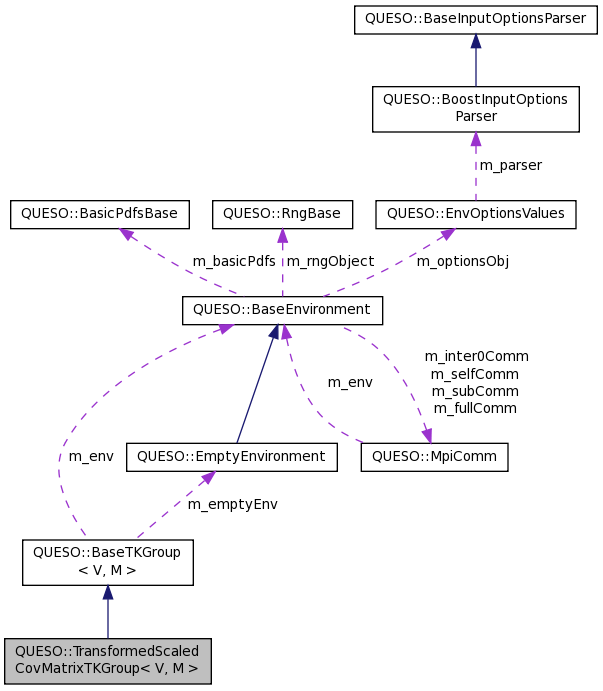
class QUESO::TransformedScaledCovMatrixTKGroup< V, M >
This class represents a transition kernel with a scaled covariance matrix on hybrid bounded/unbounded state spaces.
The unbounded directions utilise a standard Gaussian proposal. The bounded or half-bounded directions utilise a transformed Gaussian proposal, so that no realizations are generated outside of the state space.
Definition at line 48 of file TransformedScaledCovMatrixTKGroup.h.
Constructor & Destructor Documentation
| QUESO::TransformedScaledCovMatrixTKGroup< V, M >::TransformedScaledCovMatrixTKGroup | ( | const char * | prefix, |
| const BoxSubset< V, M > & | boxSubset, | ||
| const std::vector< double > & | scales, | ||
| const M & | covMatrix | ||
| ) |
Default constructor.
Definition at line 33 of file TransformedScaledCovMatrixTKGroup.C.
References QUESO::BaseEnvironment::displayVerbosity(), QUESO::BaseTKGroup< V, M >::m_env, QUESO::TransformedScaledCovMatrixTKGroup< V, M >::m_originalCovMatrix, QUESO::BaseTKGroup< V, M >::m_preComputingPositions, QUESO::BaseTKGroup< V, M >::m_rvs, QUESO::BaseTKGroup< V, M >::m_scales, QUESO::TransformedScaledCovMatrixTKGroup< V, M >::setRVsWithZeroMean(), and QUESO::BaseEnvironment::subDisplayFile().
| QUESO::TransformedScaledCovMatrixTKGroup< V, M >::~TransformedScaledCovMatrixTKGroup | ( | ) |
Member Function Documentation
|
virtual |
Clears the pre-computing positions m_preComputingPositions[stageId].
Reimplemented from QUESO::BaseTKGroup< V, M >.
Definition at line 213 of file TransformedScaledCovMatrixTKGroup.C.
References QUESO::BaseTKGroup< V, M >::clearPreComputingPositions().
|
virtual |
TODO: Prints the transition kernel.
- Todo:
- : implement me!
Reimplemented from QUESO::BaseTKGroup< V, M >.
Definition at line 242 of file TransformedScaledCovMatrixTKGroup.C.
References QUESO::BaseTKGroup< V, M >::print().
|
virtual |
InvLogitGaussian increment property to construct a transition kernel.
Implements QUESO::BaseTKGroup< V, M >.
Definition at line 79 of file TransformedScaledCovMatrixTKGroup.C.
References queso_require_greater_msg, queso_require_msg, queso_require_not_equal_to_msg, and QUESO::InvLogitGaussianVectorRV< V, M >::updateLawExpVector().
|
virtual |
InvLogitGaussian increment property to construct a transition kernel.
Implements QUESO::BaseTKGroup< V, M >.
Definition at line 112 of file TransformedScaledCovMatrixTKGroup.C.
References queso_require_greater_equal_msg, queso_require_greater_msg, queso_require_msg, and QUESO::InvLogitGaussianVectorRV< V, M >::updateLawExpVector().
|
virtual |
Sets the pre-computing positions m_preComputingPositions[stageId] with a new vector of size position.
The vector position is in physical space. This is then transformed using transformToGaussianSpace to map to a point in Gaussian space where we can, for example, update the mean of the underlying Gaussian RV.
Reimplemented from QUESO::BaseTKGroup< V, M >.
Definition at line 174 of file TransformedScaledCovMatrixTKGroup.C.
References QUESO::InvLogitGaussianJointPdf< V, M >::lawCovMatrix(), and QUESO::BaseTKGroup< V, M >::setPreComputingPosition().
|
private |
Sets the mean of the underlying Gaussian RVs to zero.
Definition at line 223 of file TransformedScaledCovMatrixTKGroup.C.
References queso_require_equal_to_msg, queso_require_msg, and queso_require_not_equal_to_msg.
Referenced by QUESO::TransformedScaledCovMatrixTKGroup< V, M >::TransformedScaledCovMatrixTKGroup().
|
virtual |
Whether or not the matrix is symmetric. Always 'false'.
Implements QUESO::BaseTKGroup< V, M >.
Definition at line 72 of file TransformedScaledCovMatrixTKGroup.C.
| void QUESO::TransformedScaledCovMatrixTKGroup< V, M >::transformToGaussianSpace | ( | const V & | physicalPoint, |
| V & | transformedPoint | ||
| ) | const |
Definition at line 250 of file TransformedScaledCovMatrixTKGroup.C.
| void QUESO::TransformedScaledCovMatrixTKGroup< V, M >::updateLawCovMatrix | ( | const M & | covMatrix | ) |
Scales the covariance matrix of the underlying Gaussian distribution.
The covariance matrix is scaled by a factor of  .
.
Definition at line 146 of file TransformedScaledCovMatrixTKGroup.C.
References QUESO::InvLogitGaussianVectorRV< V, M >::updateLawCovMatrix().
Member Data Documentation
|
private |
Definition at line 116 of file TransformedScaledCovMatrixTKGroup.h.
|
private |
Definition at line 117 of file TransformedScaledCovMatrixTKGroup.h.
Referenced by QUESO::TransformedScaledCovMatrixTKGroup< V, M >::TransformedScaledCovMatrixTKGroup().
The documentation for this class was generated from the following files:
- src/stats/inc/TransformedScaledCovMatrixTKGroup.h
- src/stats/src/TransformedScaledCovMatrixTKGroup.C