#include <GPMSA.h>
Inheritance diagram for QUESO::GPMSAEmulator< V, M >:
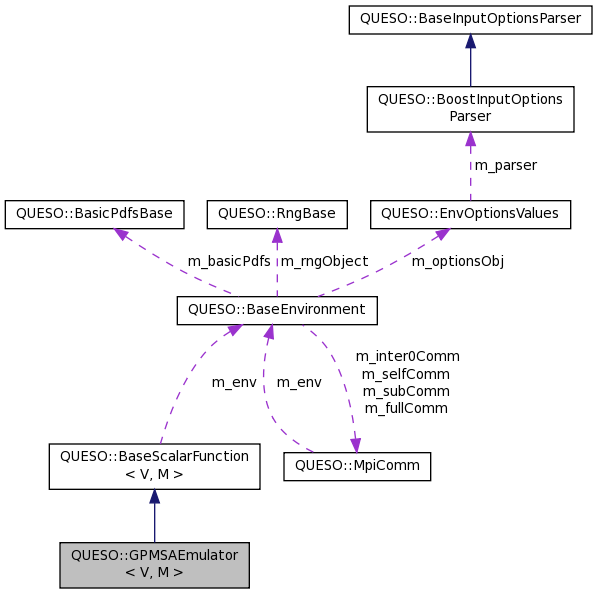
Collaboration diagram for QUESO::GPMSAEmulator< V, M >:
Public Member Functions | |
| GPMSAEmulator (const VectorSet< V, M > &domain, const VectorSpace< V, M > &m_scenarioSpace, const VectorSpace< V, M > &m_parameterSpace, const VectorSpace< V, M > &m_simulationOutputSpace, const VectorSpace< V, M > &m_experimentOutputSpace, const unsigned int m_numSimulations, const unsigned int m_numExperiments, const std::vector< V * > &m_simulationScenarios, const std::vector< V * > &m_simulationParameters, const std::vector< V * > &m_simulationOutputs, const std::vector< V * > &m_experimentScenarios, const std::vector< V * > &m_experimentOutputs, const M &m_experimentErrors, const ConcatenatedVectorRV< V, M > &m_totalPrior) | |
| virtual | ~GPMSAEmulator () |
| virtual double | lnValue (const V &domainVector, const V *domainDirection, V *gradVector, M *hessianMatrix, V *hessianEffect) const |
| Logarithm of the value of the scalar function. More... | |
| virtual double | actualValue (const V &domainVector, const V *domainDirection, V *gradVector, M *hessianMatrix, V *hessianEffect) const |
| Actual value of the scalar function. More... | |
 Public Member Functions inherited from QUESO::BaseScalarFunction< V, M > Public Member Functions inherited from QUESO::BaseScalarFunction< V, M > | |
| BaseScalarFunction (const char *prefix, const VectorSet< V, M > &domainSet) | |
| Default constructor. More... | |
| virtual | ~BaseScalarFunction () |
| Destructor. More... | |
| const VectorSet< V, M > & | domainSet () const |
Access to the protected attribute m_domainSet: domain set of the scalar function. More... | |
Public Attributes | |
| const VectorSpace< V, M > & | m_scenarioSpace |
| const VectorSpace< V, M > & | m_parameterSpace |
| const VectorSpace< V, M > & | m_simulationOutputSpace |
| const VectorSpace< V, M > & | m_experimentOutputSpace |
| const unsigned int | m_numSimulations |
| const unsigned int | m_numExperiments |
| const std::vector< V * > & | m_simulationScenarios |
| const std::vector< V * > & | m_simulationParameters |
| const std::vector< V * > & | m_simulationOutputs |
| const std::vector< V * > & | m_experimentScenarios |
| const std::vector< V * > & | m_experimentOutputs |
| const M & | m_experimentErrors |
| const ConcatenatedVectorRV< V, M > & | m_totalPrior |
Additional Inherited Members | |
| Protected Attributes inherited from QUESO::BaseScalarFunction< V, M > | |
| const BaseEnvironment & | m_env |
| std::string | m_prefix |
| const VectorSet< V, M > & | m_domainSet |
| Domain set of the scalar function. More... | |
Detailed Description
template<class V = GslVector, class M = GslMatrix>
class QUESO::GPMSAEmulator< V, M >
Constructor & Destructor Documentation
template<class V , class M >
| QUESO::GPMSAEmulator< V, M >::GPMSAEmulator | ( | const VectorSet< V, M > & | domain, |
| const VectorSpace< V, M > & | m_scenarioSpace, | ||
| const VectorSpace< V, M > & | m_parameterSpace, | ||
| const VectorSpace< V, M > & | m_simulationOutputSpace, | ||
| const VectorSpace< V, M > & | m_experimentOutputSpace, | ||
| const unsigned int | m_numSimulations, | ||
| const unsigned int | m_numExperiments, | ||
| const std::vector< V * > & | m_simulationScenarios, | ||
| const std::vector< V * > & | m_simulationParameters, | ||
| const std::vector< V * > & | m_simulationOutputs, | ||
| const std::vector< V * > & | m_experimentScenarios, | ||
| const std::vector< V * > & | m_experimentOutputs, | ||
| const M & | m_experimentErrors, | ||
| const ConcatenatedVectorRV< V, M > & | m_totalPrior | ||
| ) |
Definition at line 32 of file GPMSA.C.
const VectorSpace< V, M > & m_experimentOutputSpace
Definition: GPMSA.h:81
const std::vector< V * > & m_experimentScenarios
Definition: GPMSA.h:89
const std::vector< V * > & m_experimentOutputs
Definition: GPMSA.h:90
const std::vector< V * > & m_simulationOutputs
Definition: GPMSA.h:88
const std::vector< V * > & m_simulationScenarios
Definition: GPMSA.h:86
const std::vector< V * > & m_simulationParameters
Definition: GPMSA.h:87
const VectorSpace< V, M > & m_parameterSpace
Definition: GPMSA.h:79
const ConcatenatedVectorRV< V, M > & m_totalPrior
Definition: GPMSA.h:95
const VectorSpace< V, M > & m_scenarioSpace
Definition: GPMSA.h:78
const VectorSpace< V, M > & m_simulationOutputSpace
Definition: GPMSA.h:80
template<class V , class M >
|
virtual |
Member Function Documentation
template<class V , class M >
|
virtual |
Actual value of the scalar function.
Implements QUESO::BaseScalarFunction< V, M >.
template<class V , class M >
|
virtual |
Logarithm of the value of the scalar function.
Implements QUESO::BaseScalarFunction< V, M >.
Definition at line 73 of file GPMSA.C.
References k.
const std::vector< V * > & m_experimentScenarios
Definition: GPMSA.h:89
const std::vector< V * > & m_experimentOutputs
Definition: GPMSA.h:90
const std::vector< V * > & m_simulationOutputs
Definition: GPMSA.h:88
const std::vector< V * > & m_simulationScenarios
Definition: GPMSA.h:86
const std::vector< V * > & m_simulationParameters
Definition: GPMSA.h:87
const VectorSpace< V, M > & m_parameterSpace
Definition: GPMSA.h:79
const VectorSpace< V, M > & m_scenarioSpace
Definition: GPMSA.h:78
Member Data Documentation
template<class V = GslVector, class M = GslMatrix>
| const M& QUESO::GPMSAEmulator< V, M >::m_experimentErrors |
template<class V = GslVector, class M = GslMatrix>
| const std::vector<V *>& QUESO::GPMSAEmulator< V, M >::m_experimentOutputs |
template<class V = GslVector, class M = GslMatrix>
| const VectorSpace<V, M>& QUESO::GPMSAEmulator< V, M >::m_experimentOutputSpace |
template<class V = GslVector, class M = GslMatrix>
| const std::vector<V *>& QUESO::GPMSAEmulator< V, M >::m_experimentScenarios |
template<class V = GslVector, class M = GslMatrix>
| const unsigned int QUESO::GPMSAEmulator< V, M >::m_numExperiments |
template<class V = GslVector, class M = GslMatrix>
| const unsigned int QUESO::GPMSAEmulator< V, M >::m_numSimulations |
template<class V = GslVector, class M = GslMatrix>
| const VectorSpace<V, M>& QUESO::GPMSAEmulator< V, M >::m_parameterSpace |
template<class V = GslVector, class M = GslMatrix>
| const VectorSpace<V, M>& QUESO::GPMSAEmulator< V, M >::m_scenarioSpace |
template<class V = GslVector, class M = GslMatrix>
| const std::vector<V *>& QUESO::GPMSAEmulator< V, M >::m_simulationOutputs |
template<class V = GslVector, class M = GslMatrix>
| const VectorSpace<V, M>& QUESO::GPMSAEmulator< V, M >::m_simulationOutputSpace |
template<class V = GslVector, class M = GslMatrix>
| const std::vector<V *>& QUESO::GPMSAEmulator< V, M >::m_simulationParameters |
template<class V = GslVector, class M = GslMatrix>
| const std::vector<V *>& QUESO::GPMSAEmulator< V, M >::m_simulationScenarios |
template<class V = GslVector, class M = GslMatrix>
| const ConcatenatedVectorRV<V, M>& QUESO::GPMSAEmulator< V, M >::m_totalPrior |
The documentation for this class was generated from the following files: