A class representing a Gaussian likelihood with block-diagonal covariance matrix. More...
#include <GaussianLikelihoodBlockDiagonalCovariance.h>
Public Member Functions | |
| double & | blockCoefficient (unsigned int i) |
Get (non-const) multiplicative coefficient for block i. More... | |
| const double & | getBlockCoefficient (unsigned int i) const |
Get (const) multiplicative coefficient for block i. More... | |
| virtual double | actualValue (const V &domainVector, const V *domainDirection, V *gradVector, M *hessianMatrix, V *hessianEffect) const |
| Actual value of the scalar function. More... | |
| virtual double | lnValue (const V &domainVector, const V *domainDirection, V *gradVector, M *hessianMatrix, V *hessianEffect) const |
| Logarithm of the value of the scalar function. More... | |
Constructor/Destructor methods. | |
| GaussianLikelihoodBlockDiagonalCovariance (const char *prefix, const VectorSet< V, M > &domainSet, const V &observations, const GslBlockMatrix &covariance) | |
| Default constructor. More... | |
| virtual | ~GaussianLikelihoodBlockDiagonalCovariance () |
| Destructor. More... | |
 Public Member Functions inherited from QUESO::BaseGaussianLikelihood< V, M > Public Member Functions inherited from QUESO::BaseGaussianLikelihood< V, M > | |
| virtual void | evaluateModel (const V &domainVector, const V *domainDirection, V &modelOutput, V *gradVector, M *hessianMatrix, V *hessianEffect) const =0 |
Evaluates the user's model at the point domainVector. More... | |
| BaseGaussianLikelihood (const char *prefix, const VectorSet< V, M > &domainSet, const V &observations) | |
| Default constructor. More... | |
| virtual | ~BaseGaussianLikelihood () |
| Destructor. More... | |
| Public Member Functions inherited from QUESO::BaseScalarFunction< V, M > | |
| BaseScalarFunction (const char *prefix, const VectorSet< V, M > &domainSet) | |
| Default constructor. More... | |
| virtual | ~BaseScalarFunction () |
| Destructor. More... | |
| const VectorSet< V, M > & | domainSet () const |
Access to the protected attribute m_domainSet: domain set of the scalar function. More... | |
Private Attributes | |
| std::vector< double > | m_covarianceCoefficients |
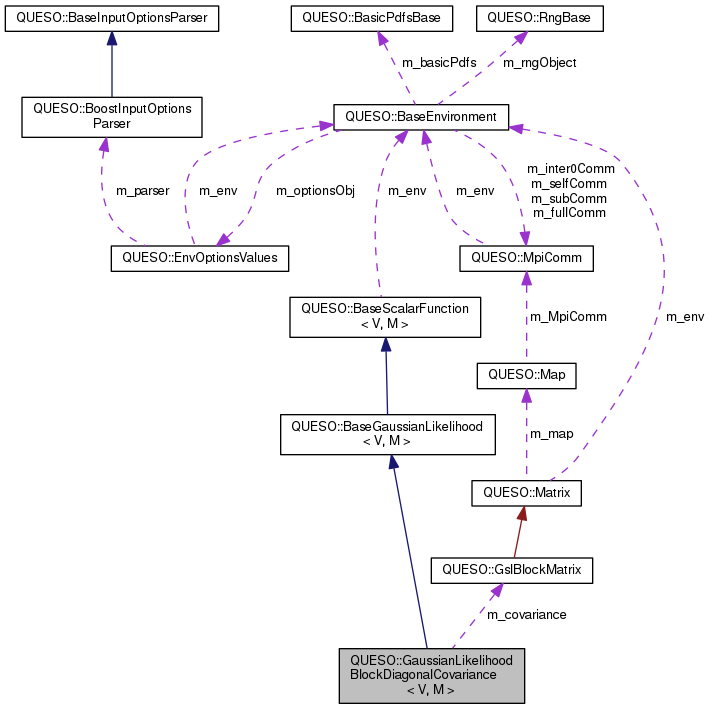
| const GslBlockMatrix & | m_covariance |
Additional Inherited Members | |
| Protected Attributes inherited from QUESO::BaseGaussianLikelihood< V, M > | |
| const V & | m_observations |
| Protected Attributes inherited from QUESO::BaseScalarFunction< V, M > | |
| const BaseEnvironment & | m_env |
| std::string | m_prefix |
| const VectorSet< V, M > & | m_domainSet |
| Domain set of the scalar function. More... | |
Detailed Description
template<class V = GslVector, class M = GslMatrix>
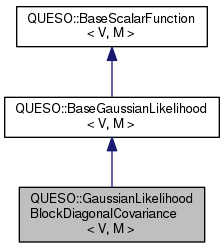
class QUESO::GaussianLikelihoodBlockDiagonalCovariance< V, M >
A class representing a Gaussian likelihood with block-diagonal covariance matrix.
Definition at line 45 of file GaussianLikelihoodBlockDiagonalCovariance.h.
Constructor & Destructor Documentation
| QUESO::GaussianLikelihoodBlockDiagonalCovariance< V, M >::GaussianLikelihoodBlockDiagonalCovariance | ( | const char * | prefix, |
| const VectorSet< V, M > & | domainSet, | ||
| const V & | observations, | ||
| const GslBlockMatrix & | covariance | ||
| ) |
Default constructor.
Instantiates a Gaussian likelihood function, given a prefix, its domain, a vector of observations and a block diagonal covariance matrix. The diagonal covariance matrix is of type GslBlockMatrix. Each block in the block diagonal matrix is an object of type GslMatrix.
Furthermore, each block comes with a multiplicative coefficient which defaults to 1.0.
Definition at line 35 of file GaussianLikelihoodBlockDiagonalCovariance.C.
References QUESO::GslBlockMatrix::getBlock(), QUESO::GaussianLikelihoodBlockDiagonalCovariance< V, M >::m_covariance, QUESO::GslBlockMatrix::numBlocks(), QUESO::GslMatrix::numRowsLocal(), and queso_error_msg.
|
virtual |
Member Function Documentation
|
virtual |
Actual value of the scalar function.
Implements QUESO::BaseScalarFunction< V, M >.
Definition at line 76 of file GaussianLikelihoodBlockDiagonalCovariance.C.
| double & QUESO::GaussianLikelihoodBlockDiagonalCovariance< V, M >::blockCoefficient | ( | unsigned int | i | ) |
Get (non-const) multiplicative coefficient for block i.
Definition at line 60 of file GaussianLikelihoodBlockDiagonalCovariance.C.
| const double & QUESO::GaussianLikelihoodBlockDiagonalCovariance< V, M >::getBlockCoefficient | ( | unsigned int | i | ) | const |
Get (const) multiplicative coefficient for block i.
Definition at line 68 of file GaussianLikelihoodBlockDiagonalCovariance.C.
|
virtual |
Logarithm of the value of the scalar function.
Implements QUESO::BaseScalarFunction< V, M >.
Definition at line 86 of file GaussianLikelihoodBlockDiagonalCovariance.C.
Member Data Documentation
|
private |
Definition at line 83 of file GaussianLikelihoodBlockDiagonalCovariance.h.
Referenced by QUESO::GaussianLikelihoodBlockDiagonalCovariance< V, M >::GaussianLikelihoodBlockDiagonalCovariance().
|
private |
Definition at line 82 of file GaussianLikelihoodBlockDiagonalCovariance.h.
The documentation for this class was generated from the following files:
- src/stats/inc/GaussianLikelihoodBlockDiagonalCovariance.h
- src/stats/src/GaussianLikelihoodBlockDiagonalCovariance.C