A class for handling Gaussian joint PDFs. More...
#include <GaussianJointPdf.h>
Public Member Functions | |
Constructor/Destructor methods | |
| GaussianJointPdf (const char *prefix, const VectorSet< V, M > &domainSet, const V &lawExpVector, const V &lawVarVector) | |
| Constructor. More... | |
| GaussianJointPdf (const char *prefix, const VectorSet< V, M > &domainSet, const V &lawExpVector, const M &lawCovMatrix) | |
| Constructor. More... | |
| ~GaussianJointPdf () | |
| Destructor. More... | |
Math methods | |
| double | actualValue (const V &domainVector, const V *domainDirection, V *gradVector, M *hessianMatrix, V *hessianEffect) const |
| Actual value of the Gaussian PDF: More... | |
| double | lnValue (const V &domainVector, const V *domainDirection, V *gradVector, M *hessianMatrix, V *hessianEffect) const |
| Logarithm of the value of the Gaussian PDF (scalar function). More... | |
| double | computeLogOfNormalizationFactor (unsigned int numSamples, bool updateFactorInternally) const |
| Computes the logarithm of the normalization factor. More... | |
| void | updateLawExpVector (const V &newLawExpVector) |
Updates the mean with the new value newLawExpVector. More... | |
| void | updateLawCovMatrix (const M &newLawCovMatrix) |
Updates the lower triangular matrix from Cholesky decomposition of the covariance matrix to the new value newLowerCholLawCovMatrix. More... | |
| const M & | lawCovMatrix () const |
| Returns the covariance matrix; access to protected attribute m_lawCovMatrix. More... | |
| const V & | lawExpVector () const |
| Access to the vector of mean values and private attribute: m_lawExpVector. More... | |
| const V & | lawVarVector () const |
| Access to the vector of variance values and private attribute: m_lawVarVector. More... | |
 Public Member Functions inherited from QUESO::BaseJointPdf< V, M > Public Member Functions inherited from QUESO::BaseJointPdf< V, M > | |
| BaseJointPdf (const char *prefix, const VectorSet< V, M > &domainSet) | |
| Default constructor. More... | |
| virtual | ~BaseJointPdf () |
| Destructor. More... | |
| virtual void | setNormalizationStyle (unsigned int value) const |
| Sets a value to be used in the normalization style (stored in the protected attribute m_normalizationStyle.) More... | |
| void | setLogOfNormalizationFactor (double value) const |
| Sets a logarithmic value to be used in the normalization factor (stored in the protected attribute m_normalizationStyle.) More... | |
| Public Member Functions inherited from QUESO::BaseScalarFunction< V, M > | |
| BaseScalarFunction (const char *prefix, const VectorSet< V, M > &domainSet) | |
| Default constructor. More... | |
| virtual | ~BaseScalarFunction () |
| Destructor. More... | |
| const VectorSet< V, M > & | domainSet () const |
Access to the protected attribute m_domainSet: domain set of the scalar function. More... | |
Protected Attributes | |
| V * | m_lawExpVector |
| V * | m_lawVarVector |
| bool | m_diagonalCovMatrix |
| const M * | m_lawCovMatrix |
| Protected Attributes inherited from QUESO::BaseJointPdf< V, M > | |
| unsigned int | m_normalizationStyle |
| double | m_logOfNormalizationFactor |
| Protected Attributes inherited from QUESO::BaseScalarFunction< V, M > | |
| const BaseEnvironment & | m_env |
| std::string | m_prefix |
| const VectorSet< V, M > & | m_domainSet |
| Domain set of the scalar function. More... | |
Additional Inherited Members | |
| Protected Member Functions inherited from QUESO::BaseJointPdf< V, M > | |
| double | commonComputeLogOfNormalizationFactor (unsigned int numSamples, bool updateFactorInternally) const |
| Common method (to the derived classes) to compute the logarithm of the normalization factor. More... | |
Detailed Description
template<class V = GslVector, class M = GslMatrix>
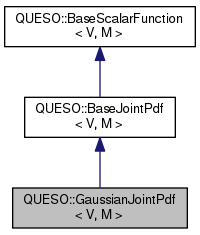
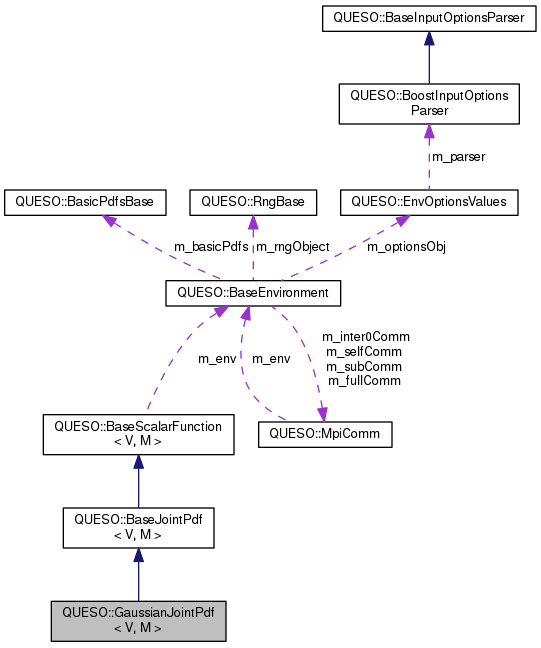
class QUESO::GaussianJointPdf< V, M >
A class for handling Gaussian joint PDFs.
This class allows the mathematical definition of a Gaussian Joint PDF.
Definition at line 52 of file GaussianJointPdf.h.
Constructor & Destructor Documentation
| QUESO::GaussianJointPdf< V, M >::GaussianJointPdf | ( | const char * | prefix, |
| const VectorSet< V, M > & | domainSet, | ||
| const V & | lawExpVector, | ||
| const V & | lawVarVector | ||
| ) |
Constructor.
Constructs a new object, given a prefix and the domain of the PDF, a vector of mean values, lawExpVector, and a vector of covariance values lawVarVector (an alternative representation for a diagonal covariance matrix).
Definition at line 33 of file GaussianJointPdf.C.
References QUESO::BaseEnvironment::displayVerbosity(), QUESO::GaussianJointPdf< V, M >::lawExpVector(), QUESO::GaussianJointPdf< V, M >::lawVarVector(), QUESO::BaseScalarFunction< V, M >::m_env, QUESO::BaseScalarFunction< V, M >::m_prefix, and QUESO::BaseEnvironment::subDisplayFile().
| QUESO::GaussianJointPdf< V, M >::GaussianJointPdf | ( | const char * | prefix, |
| const VectorSet< V, M > & | domainSet, | ||
| const V & | lawExpVector, | ||
| const M & | lawCovMatrix | ||
| ) |
Constructor.
Constructs a new object, given a prefix and the image set of the vector realizer, a vector of mean values, lawExpVector, and a covariance matrix, lawCovMatrix.
Definition at line 68 of file GaussianJointPdf.C.
References QUESO::BaseEnvironment::displayVerbosity(), QUESO::GaussianJointPdf< V, M >::lawExpVector(), QUESO::BaseScalarFunction< V, M >::m_env, QUESO::BaseScalarFunction< V, M >::m_prefix, and QUESO::BaseEnvironment::subDisplayFile().
| QUESO::GaussianJointPdf< V, M >::~GaussianJointPdf | ( | ) |
Member Function Documentation
|
virtual |
Actual value of the Gaussian PDF:
This method calls lnValue() and applies the exponential to it.
Implements QUESO::BaseJointPdf< V, M >.
Definition at line 125 of file GaussianJointPdf.C.
References queso_require_equal_to_msg, and queso_require_msg.
|
virtual |
Computes the logarithm of the normalization factor.
This routine calls BaseJointPdf::commonComputeLogOfNormalizationFactor().
Implements QUESO::BaseJointPdf< V, M >.
Definition at line 274 of file GaussianJointPdf.C.
References QUESO::BaseJointPdf< V, M >::commonComputeLogOfNormalizationFactor().
| const M & QUESO::GaussianJointPdf< V, M >::lawCovMatrix | ( | ) | const |
Returns the covariance matrix; access to protected attribute m_lawCovMatrix.
Definition at line 314 of file GaussianJointPdf.C.
Referenced by QUESO::ScaledCovMatrixTKGroup< V, M >::setPreComputingPosition().
| const V & QUESO::GaussianJointPdf< V, M >::lawExpVector | ( | ) | const |
Access to the vector of mean values and private attribute: m_lawExpVector.
Definition at line 111 of file GaussianJointPdf.C.
Referenced by QUESO::GaussianJointPdf< V, M >::GaussianJointPdf().
| const V & QUESO::GaussianJointPdf< V, M >::lawVarVector | ( | ) | const |
Access to the vector of variance values and private attribute: m_lawVarVector.
Definition at line 118 of file GaussianJointPdf.C.
Referenced by QUESO::GaussianJointPdf< V, M >::GaussianJointPdf().
|
virtual |
Logarithm of the value of the Gaussian PDF (scalar function).
The ln(value) comes from a summation of the Gaussian density:
![\[ lnValue =- \sum_i \frac{1}{\sqrt{|covMatrix|} \sqrt{2 \pi}} exp(-\frac{(domainVector_i - lawExpVector_i)* covMatrix^{-1}* (domainVector_i - lawExpVector_i) }{2}, \]](form_120.png)
where the  may recovered via
may recovered via this->lawVarVector(), in case of diagonal matrices or via this->m_lawCovMatrix, otherwise.
Implements QUESO::BaseJointPdf< V, M >.
Definition at line 174 of file GaussianJointPdf.C.
References queso_require_msg.
| void QUESO::GaussianJointPdf< V, M >::updateLawCovMatrix | ( | const M & | newLawCovMatrix | ) |
Updates the lower triangular matrix from Cholesky decomposition of the covariance matrix to the new value newLowerCholLawCovMatrix.
This method deletes old expected values (allocated at construction or last call to this method).
Definition at line 304 of file GaussianJointPdf.C.
| void QUESO::GaussianJointPdf< V, M >::updateLawExpVector | ( | const V & | newLawExpVector | ) |
Updates the mean with the new value newLawExpVector.
This method deletes old expected values (allocated at construction or last call to this method).
Definition at line 294 of file GaussianJointPdf.C.
Member Data Documentation
|
protected |
Definition at line 118 of file GaussianJointPdf.h.
|
protected |
Definition at line 119 of file GaussianJointPdf.h.
|
protected |
Definition at line 116 of file GaussianJointPdf.h.
|
protected |
Definition at line 117 of file GaussianJointPdf.h.
The documentation for this class was generated from the following files:
- src/stats/inc/GaussianJointPdf.h
- src/stats/src/GaussianJointPdf.C