A class representing a Gaussian vector RV. More...
#include <GaussianVectorRV.h>
Public Member Functions | |
Constructor/Destructor methods | |
| GaussianVectorRV (const char *prefix, const VectorSet< V, M > &imageSet, const V &lawExpVector, const V &lawVarVector) | |
| Constructor. More... | |
| GaussianVectorRV (const char *prefix, const VectorSet< V, M > &imageSet, const V &lawExpVector, const M &lawCovMatrix) | |
| Constructor. More... | |
| virtual | ~GaussianVectorRV () |
| Virtual destructor. More... | |
Statistical methods | |
| void | updateLawExpVector (const V &newLawExpVector) |
| Updates the vector that contains the mean values. More... | |
| void | updateLawCovMatrix (const M &newLawCovMatrix) |
| Updates the covariance matrix. More... | |
I/O methods | |
| void | print (std::ostream &os) const |
| TODO: Prints the vector RV. More... | |
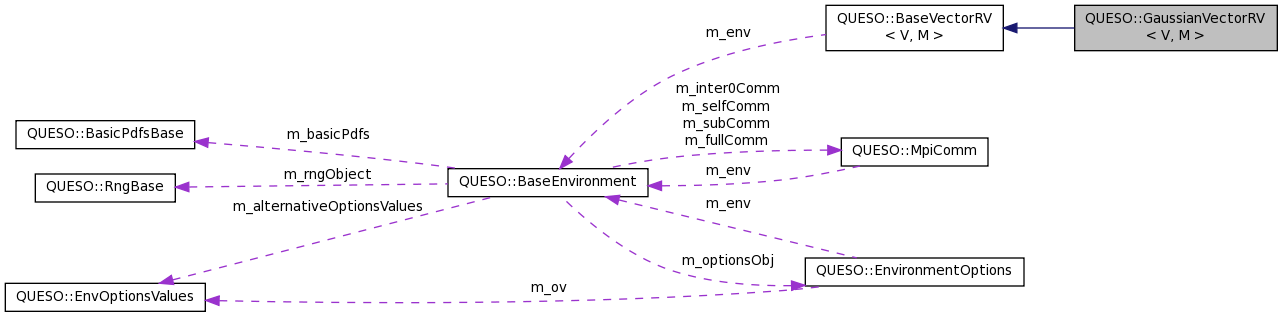
 Public Member Functions inherited from QUESO::BaseVectorRV< V, M > Public Member Functions inherited from QUESO::BaseVectorRV< V, M > | |
| BaseVectorRV (const char *prefix, const VectorSet< V, M > &imageSet) | |
| Constructor. More... | |
| virtual | ~BaseVectorRV () |
| Virtual destructor. More... | |
| const BaseEnvironment & | env () const |
| QUESO environment; access to private attribute m_env. More... | |
| const VectorSet< V, M > & | imageSet () const |
| Image set of the vector RV; access to private attribute m_imageSet. More... | |
| const BaseJointPdf< V, M > & | pdf () const |
| Posterior Density Function of the vector RV; access to private attribute m_pdf. More... | |
| const BaseVectorRealizer< V, M > & | realizer () const |
| Finds a realization (sample) of the PDF of this vector RV; access to private attribute m_realizer. More... | |
| const BaseVectorCdf< V, M > & | subCdf () const |
| Finds the Cumulative Distribution Function of this vector RV, considering only the sub-sequence of data; access to private attribute m_subCdf. More... | |
| const BaseVectorCdf< V, M > & | unifiedCdf () const |
| Finds the Cumulative Distribution Function of this vector RV, considering the unified sequence of data; access to private attribute m_unifiedCdf. More... | |
| const BaseVectorMdf< V, M > & | mdf () const |
| Finds the Mass Density Function of this vector RV; access to private attribute m_mdf. More... | |
Additional Inherited Members | |
| Protected Attributes inherited from QUESO::BaseVectorRV< V, M > | |
| const BaseEnvironment & | m_env |
| std::string | m_prefix |
| const VectorSet< V, M > & | m_imageSet |
| BaseJointPdf< V, M > * | m_pdf |
| BaseVectorRealizer< V, M > * | m_realizer |
| const BaseVectorCdf< V, M > * | m_subCdf |
| const BaseVectorCdf< V, M > * | m_unifiedCdf |
| const BaseVectorMdf< V, M > * | m_mdf |
Detailed Description
template<class V, class M>
class QUESO::GaussianVectorRV< V, M >
A class representing a Gaussian vector RV.
This class allows the user to compute the value of a Gaussian PDF and to generate realizations (samples) from it.
In probability theory, the normal (or Gaussian) distribution is a continuous probability distribution, defined by the formula:
![\[ f(x| \mu,\sigma) = \frac{1}{\sigma\sqrt{2\pi}} e^{ -\frac{(x-\mu)^2}{2\sigma^2} }. \]](form_122.png)
The parameter  in this formula is the mean or expectation of the distribution (and also its median and mode). The parameter
in this formula is the mean or expectation of the distribution (and also its median and mode). The parameter  is its standard deviation; its variance is therefore
is its standard deviation; its variance is therefore  .
.
Definition at line 60 of file GaussianVectorRV.h.
Constructor & Destructor Documentation
| QUESO::GaussianVectorRV< V, M >::GaussianVectorRV | ( | const char * | prefix, |
| const VectorSet< V, M > & | imageSet, | ||
| const V & | lawExpVector, | ||
| const V & | lawVarVector | ||
| ) |
Constructor.
Construct a Gaussian vector RV with mean lawExpVector and diagonal covariance matrix lawVarVector whose variates live in imageSet.
Definition at line 35 of file GaussianVectorRV.C.
References QUESO::BaseEnvironment::displayVerbosity(), QUESO::BaseVectorRV< V, M >::m_env, QUESO::BaseVectorRV< V, M >::m_imageSet, QUESO::BaseVectorRV< V, M >::m_mdf, QUESO::BaseVectorRV< V, M >::m_pdf, QUESO::BaseVectorRV< V, M >::m_prefix, QUESO::BaseVectorRV< V, M >::m_realizer, QUESO::BaseVectorRV< V, M >::m_subCdf, QUESO::BaseVectorRV< V, M >::m_unifiedCdf, QUESO::BaseEnvironment::subDisplayFile(), UQ_FATAL_TEST_MACRO, and QUESO::BaseEnvironment::worldRank().
| QUESO::GaussianVectorRV< V, M >::GaussianVectorRV | ( | const char * | prefix, |
| const VectorSet< V, M > & | imageSet, | ||
| const V & | lawExpVector, | ||
| const M & | lawCovMatrix | ||
| ) |
Constructor.
Construct a Gaussian vector RV with mean lawExpVector and covariance matrix lawCovMatrix whose variates live in imageSet.
Definition at line 81 of file GaussianVectorRV.C.
References QUESO::BaseEnvironment::displayVerbosity(), QUESO::BaseVectorRV< V, M >::m_env, QUESO::BaseVectorRV< V, M >::m_imageSet, QUESO::BaseVectorRV< V, M >::m_mdf, QUESO::BaseVectorRV< V, M >::m_pdf, QUESO::BaseVectorRV< V, M >::m_prefix, QUESO::BaseVectorRV< V, M >::m_realizer, QUESO::BaseVectorRV< V, M >::m_subCdf, QUESO::BaseVectorRV< V, M >::m_unifiedCdf, QUESO::BaseEnvironment::subDisplayFile(), UQ_FATAL_TEST_MACRO, and QUESO::BaseEnvironment::worldRank().
|
virtual |
Virtual destructor.
Definition at line 146 of file GaussianVectorRV.C.
Member Function Documentation
|
virtual |
TODO: Prints the vector RV.
- Todo:
- : implement me!
Implements QUESO::BaseVectorRV< V, M >.
Definition at line 204 of file GaussianVectorRV.C.
| void QUESO::GaussianVectorRV< V, M >::updateLawCovMatrix | ( | const M & | newLawCovMatrix | ) |
Updates the covariance matrix.
This method tries to use Cholesky decomposition; and if it fails, the method then calls a SVD decomposition.
Definition at line 167 of file GaussianVectorRV.C.
References UQ_FATAL_TEST_MACRO.
Referenced by QUESO::HessianCovMatricesTKGroup< V, M >::rv().
| void QUESO::GaussianVectorRV< V, M >::updateLawExpVector | ( | const V & | newLawExpVector | ) |
Updates the vector that contains the mean values.
Definition at line 157 of file GaussianVectorRV.C.
Referenced by QUESO::ScaledCovMatrixTKGroup< V, M >::rv(), and QUESO::HessianCovMatricesTKGroup< V, M >::rv().
The documentation for this class was generated from the following files:
- src/stats/inc/GaussianVectorRV.h
- src/stats/src/GaussianVectorRV.C